






Controllo PID: analisi di un controllore PID commerciale. Il Regolatore PID a 2 canali PCE-RE110P

In due precedenti articoli sul tema dei controllori PID abbiamo parlato rispettivamente di
2) perché questi regolatori industriali abbiano trovato una grande diffusione, ovvero la semplicità di taratura e funzionamento e la loro grande diffusione. Questa grande diffusione ha, a sua volta, fatto scendere il costo grazie all'economia di scala, rispetto a controllori appositamente costruiti sul processo, e ha anche fatto si che un largo numero di tecnici sia in grado di utilizzarli ed effettuarne la taratura , richiedendo un livello di specializzazione inferiore rispetto alla progettazione di sistemi di controllo dedicato.
In questo articolo toccheremo con mano come è fatto un regolatore PID di quelli che si possono trovare in commercio, prendendo come esempio il Regolatore PID PCE-RE110P a 2 canali .
Prima un breve riassunto delle puntate precedenti : questi regolatori devono il loro nome all’acronimo che deriva dalle leggi di controllo che utilizzano, cioè azione Proporzionale, azione Integrale, azione Derivativa. Il PID infatti utilizza queste azioni per il suo funzionamento e regola l'uscita in base a:
- il valore del segnale di errore (azione proporzionale);
- i valori passati del segnale di errore (azione integrale);
- quanto velocemente il segnale di errore varia (azione derivativa).
Il regolatore PID quindi acquisisce in ingresso un valore da un processo e lo confronta con un valore di riferimento. La differenza, e cioè il cosiddetto segnale di errore, viene quindi usata per determinare il valore della variabile di uscita del controllore, che è la variabile manipolabile del processo. Possono essere applicati ai più svariati ambiti, dal controllo di una portata di un fluido alla regolazione della temperatura, dalla movimentazione di un braccio robotico al controllo di un freno per i banchi prova motori. Questi dispositivi infatti, per mezzo di dispositivi di correzione (manopole o software di ausilio), permettono di regolare i parametri del sistema di controllo entro certi limiti. Per questo motivo la funzione di controllo esercitata dai PID risulta di fondamentale importanza (per esempio negli impianti chimici e petrolchimici), sia per i costi bassi di implementazione ma anche perché permette di unificare i meccanismi di controllo dell’impianto.
Analizziamo in questa sede in regolatore PID prodotto e commercializzato da PCE Instruments. Si tratta del Regolatore PID a 2 canali PCE-RE110P. Questo regolatore PID viene utilizzato principalmente per la regolazione della temperatura e dei processi. I vari collegamenti di ingresso e uscita incorporati nel regolatore PID consentono infatti di usare questo dispositivo in modo versatile. Vediamone di cosa dispone:
- 2 canali con differenti uscite di regolazione
- 2 ingressi analogici di regolazione
- regolazione programmata
- uscite con un relè integrato di commutazione e un relè SSR che può essere usato per impostare un allarme, in modo da ricevere un avviso in caso di anomalia;
- 4 ingressi digitali e alimentazione del sensore;
- display LCD a colori da 3.5'' , attraverso il quale è possibile visualizzare i valori nominali nel del regolatore; le impostazioni possono essere effettuate attraverso i tasti presenti sulla parte frontale;
- funzioni integrate di auto-ottimizzazione e AUTO-PID che consentono di definire i parametri di regolazione ottimali;
- funzione Soft-Start e una regolazione On/Off , delle quali il regolatore a 2 canali è stato dotato per evitare problemi all'inizio di un processo di regolazione, in modo da escludere repentinamente il regolatore in caso di problemi
- integra una interfaccia RS-485 Modbus RTU per il trasferimento dei dati a un sistema di processi;
- Installazione su pannello da 92 x 92 mm;
- Alimentazione: 90 ... 250 V AC
- Condizioni operative 0 ... 50 °C / max. 80% U.R.
- Grado di protezione frontale IP65
- Grado di protezione posteriore IP20 ( in fondo all'articolo, la vista posteriore e laterale del regolatore )
- Dimensioni 96 x 96 x 81 mm
- Dimensioni per installazione su pannello 92 x 92 mm
- Peso Circa 400 g
- Potenza assorbita : 7 VA
 -
- 















 per quanto riguarda la W(s) ; m ed n sono rispettivamente il grado del numeratore e del denominatore della funzione di trasferimento a ciclo chiuso , mentre mp ed np sono rispettivamente il grado del numeratore e del denominatore del processo , quindi tale condizione equivale a chiedere che l'eccesso poli-zeri della W(s) sia almeno pari all'eccesso poli-zeri del processo.
per quanto riguarda la W(s) ; m ed n sono rispettivamente il grado del numeratore e del denominatore della funzione di trasferimento a ciclo chiuso , mentre mp ed np sono rispettivamente il grado del numeratore e del denominatore del processo , quindi tale condizione equivale a chiedere che l'eccesso poli-zeri della W(s) sia almeno pari all'eccesso poli-zeri del processo.  per quanto riguarda la Wz(s) ; il significato fisico di tale condizione è evidente : non si può chiedere ad un sistema di controllo di attenuare ( |Wz(s)|<1 ) gli effetti del rumore a tutte le frequenze.
per quanto riguarda la Wz(s) ; il significato fisico di tale condizione è evidente : non si può chiedere ad un sistema di controllo di attenuare ( |Wz(s)|<1 ) gli effetti del rumore a tutte le frequenze.











 , la funzione di trasferimento disturbo/uscita
, la funzione di trasferimento disturbo/uscita  e tenere presente che l'uscita desiderata rispetto al disturbo è nulla (
e tenere presente che l'uscita desiderata rispetto al disturbo è nulla (  ) : si vorrebbe infatti che il sistema di controllo fosse insensibile ai disturbi , che questi , cioè, non producessero alcun effetto sull'uscita.
) : si vorrebbe infatti che il sistema di controllo fosse insensibile ai disturbi , che questi , cioè, non producessero alcun effetto sull'uscita.  .
.




 , vista nel paragrafo precedente , per i sistemi di controllo proporzionali , a partire da diverse possibili espressioni per la funzione di trasferimento W(s) :
, vista nel paragrafo precedente , per i sistemi di controllo proporzionali , a partire da diverse possibili espressioni per la funzione di trasferimento W(s) : . Sviluppando l'equazione della We(s) e portando i due termini a denominatore comune , otteniamo :
. Sviluppando l'equazione della We(s) e portando i due termini a denominatore comune , otteniamo :

 . Si tratta di trovare delle relazioni fra le costanti di tempo dei singoli poli e zeri : trovare una condizione di validità generale per ogni k , a partire dalla proposizione 1 , risulta in questo caso più difficile . Conviene allora , a partire dalle condizioni sui Ce,i trovate nel paragrafo precedente, trovare delle condizioni per ottenere dei sistemi di tipo zero, uno , due, che sono quelli più facili da trovare operativamente.
. Si tratta di trovare delle relazioni fra le costanti di tempo dei singoli poli e zeri : trovare una condizione di validità generale per ogni k , a partire dalla proposizione 1 , risulta in questo caso più difficile . Conviene allora , a partire dalle condizioni sui Ce,i trovate nel paragrafo precedente, trovare delle condizioni per ottenere dei sistemi di tipo zero, uno , due, che sono quelli più facili da trovare operativamente. . In caso contrario il sistema è certamente di tipo k>0.
. In caso contrario il sistema è certamente di tipo k>0. e , per la definizione stessa del guadagno statico :
e , per la definizione stessa del guadagno statico :  . Pertanto perché il coefficiente sia non nullo deve aversi
. Pertanto perché il coefficiente sia non nullo deve aversi 



 , perciò imponendo che Ce,2=0 si ha la 3B.3) .
, perciò imponendo che Ce,2=0 si ha la 3B.3) .

 .
. ) , la funzione di trasferimento del sistema errore si può scrivere come :
) , la funzione di trasferimento del sistema errore si può scrivere come : .
. .
.

 ,
,


 .
.




 .
. all'ingresso a regime
all'ingresso a regime  per una quantità costante non nulla.
per una quantità costante non nulla. 

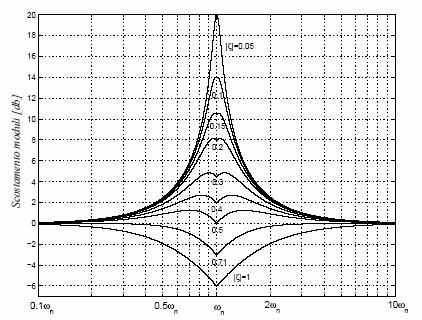
 da scegliere in base alle costanti di tempo del sistema da analizare ( solitamente 1 rad/s) . Anche l'asse delle ordinate , per il diagramma del modulo , ha scala logaritmica espressa in decibel :
da scegliere in base alle costanti di tempo del sistema da analizare ( solitamente 1 rad/s) . Anche l'asse delle ordinate , per il diagramma del modulo , ha scala logaritmica espressa in decibel :
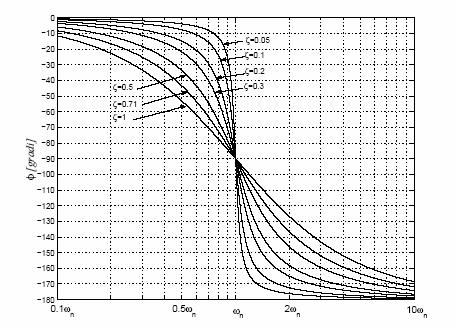
 in gradi o radianti.
in gradi o radianti.
 ;
;

 ;
; .
.

 , dove si è definito
, dove si è definito  , e:
, e: , per cui il modulo è pressoché nullo
, per cui il modulo è pressoché nullo  e si è visto, analizzando il contributo del derivatore, che tale espressione corrisponde ad una pendenza positiva di 20dB/decade.
e si è visto, analizzando il contributo del derivatore, che tale espressione corrisponde ad una pendenza positiva di 20dB/decade. e :
e :



 , definita dall'equazione
, definita dall'equazione  , come intersezione fra il diagramma della fase e la linea tratteggiata verde in figura ;
, come intersezione fra il diagramma della fase e la linea tratteggiata verde in figura ;  , definita in precedenza come
, definita in precedenza come  , dall'intersezione fra il diagramma del modulo e la linea tratteggiata celeste ( asse delle ascisse del primo diagramma , corrispondente ad una retta a modulo costante 0dB )
, dall'intersezione fra il diagramma del modulo e la linea tratteggiata celeste ( asse delle ascisse del primo diagramma , corrispondente ad una retta a modulo costante 0dB )